Vex Robotics 🤖
Autodesk Fusion 360 design, CNC manufacturing and Prototyping
Project Overview
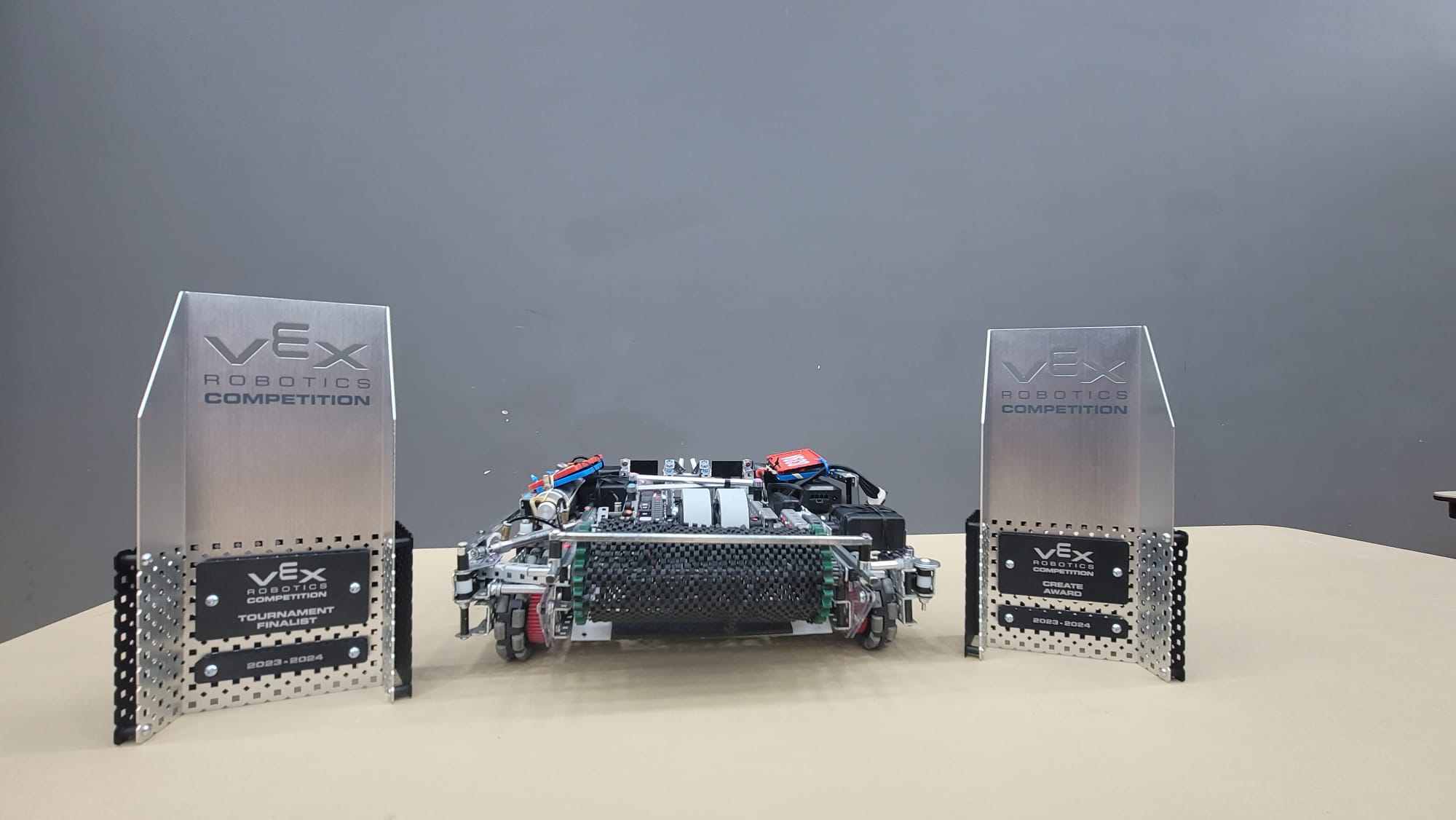
Across five VEX Robotics seasons—Tower Takeover (2019‑20), Change Up (2020‑21), Tipping Point (2021‑22), Spin Up (2022‑23), and Over Under (2023‑24)—our 839 “Caution Tape” team built multiple full robots each year, rapidly cycling through design‑test‑refine loops to keep pace with evolving game strategy. Every season began with rough CAD concepts, progressed through at‑bench prototypes, and ended with a competition‑ready machine (one of several iterations) tuned for autonomous precision and match‑play robustness. This continual prototyping culture helped us claim numerous provincial titles and, in the Change Up season, a World‑Champion win in Dallas, Texas.
My Contributions
Serving as both team lead and mechanical design lead, I directed season‑long engineering sprints: translating game rules into requirements, running design scrums, and green‑lighting prototype pathways. I developed drive bases, scoring mechanisms, and end‑game actuators in CAD, then oversaw CNC machining, 3‑D printing, and pit‑lane rebuilds when field tests exposed weaknesses. I also mentored newer members in drivetrain math, gear‑ratio selection, and VEXcode autonomous scripting, while coordinating scouting data and match strategy that maximized each robot’s competitive edge.
Each season the robots had numerous iterations and redesigns however, In this Page I will be covering only the new and key concepts I learned from each season.
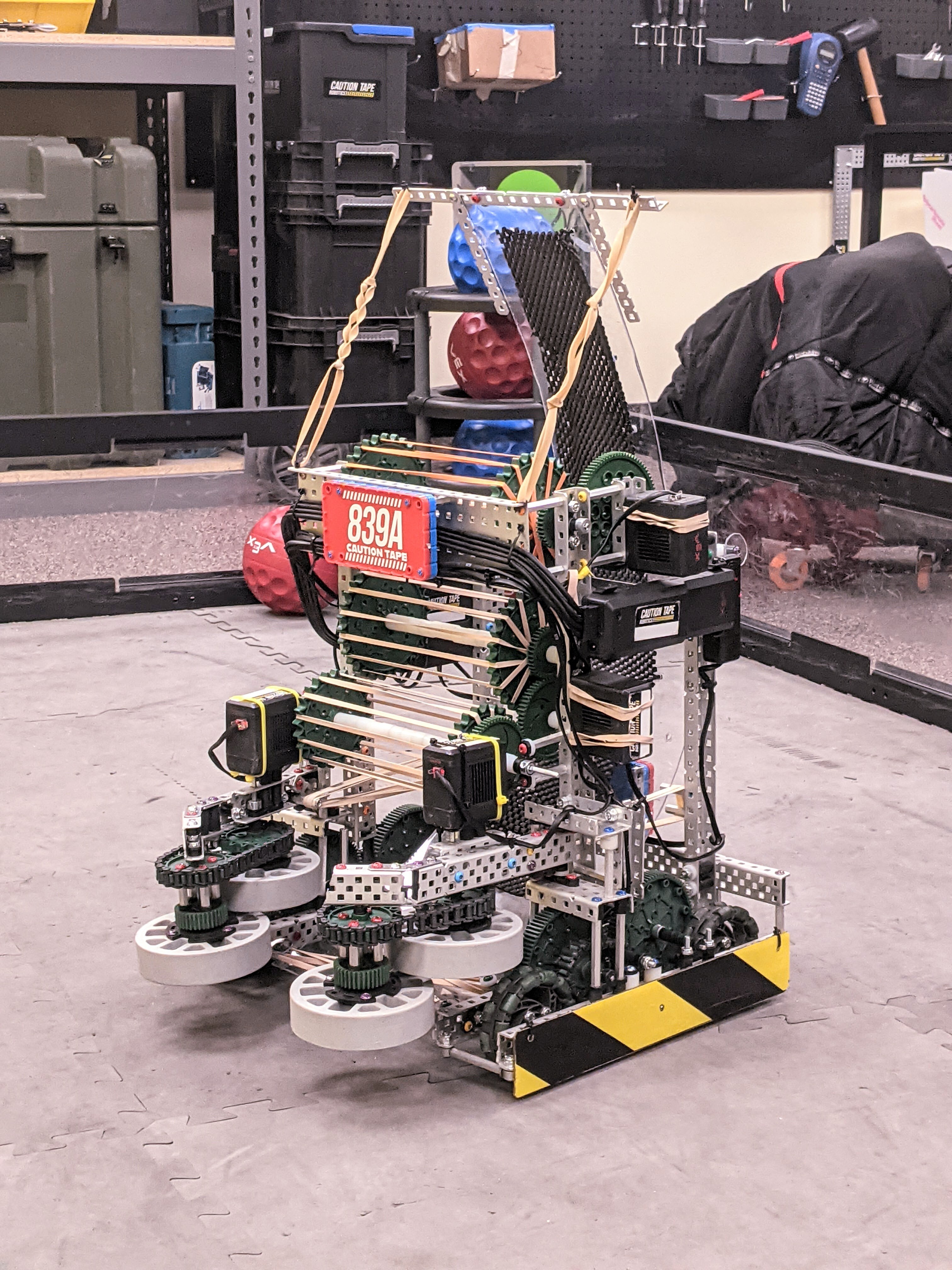
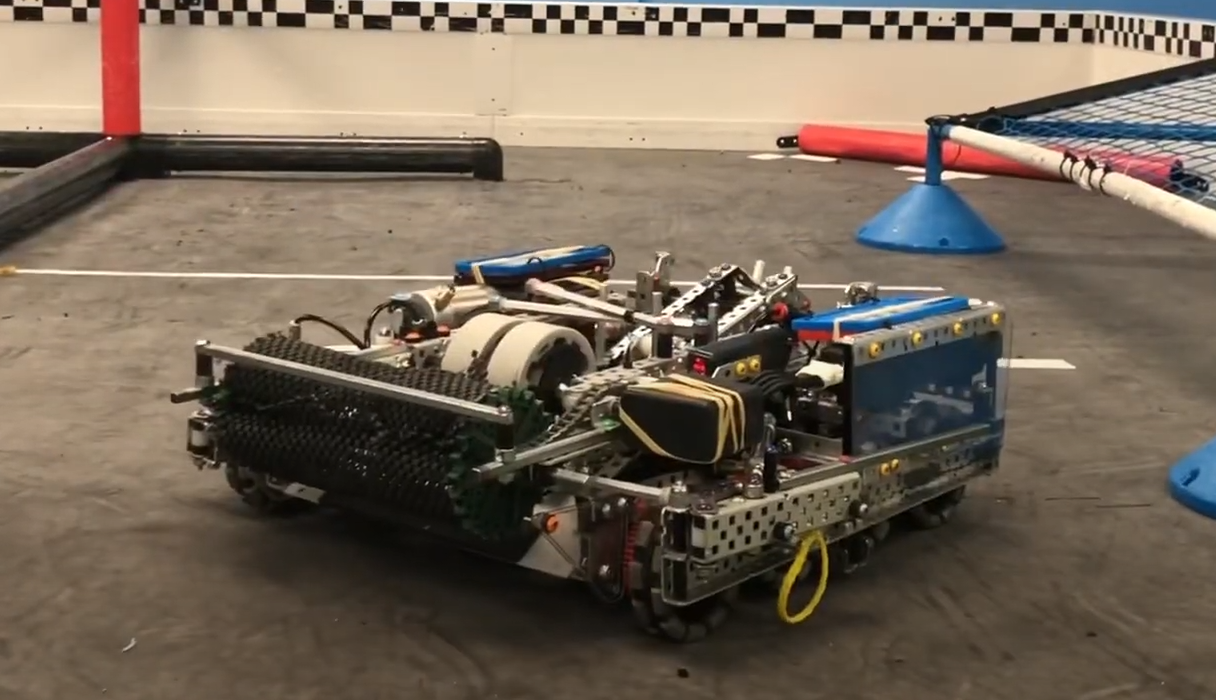
Tower Takeover 🗼
Skills Developed ✅
- Fundamentals of VEX metal construction and fastener selection—my first hands-on build with 18 × 18 × 18 in. starting constraints
- Designing and tuning a holonomic omni-mecanum drivetrain for smooth strafing, rotation, and cube-stack alignment
- Creating a multi-stage, spring-assisted tray that locks for inspection then deploys via a trigger release to stack 13 cubes reliably
- Calculating gear ratios and motor loads; learning how VEX V5 Smart Motors overheat, derate torque, and recover
- Integrating rubber-band assist systems to off-load heavy trays, reduce stall current, and extend motor run-time
- Basic Fusion 360 CAD layout and iterative prototyping to balance expansion reach with center-of-gravity limits
- Initial exposure to autonomous C++ code and driver-control mapping for precise stack placement
- Match-day troubleshooting—quick repairs, motor-swap drills, and on-the-fly PID gain tweaks under event time pressure
Change Up 🎮
Skills Developed ✅
- Team leadership & driving: first season as head captain and primary driver—set build deadlines, ran strategy scrums, and led match play that carried 839Z to the 2020-21 VEX World Championship title.
- Comparative drivetrain engineering: designed, built, and field-tested two chassis—an omni-directional X-drive for early agility trials and a 6-wheel, 300 rpm inline drive for greater pushing power and straight-line speed.
- High-speed intake & cycling systems: created roller intakes and a vertical conveyor to sort red/blue game balls, fine-tuning compression, gearing, and anti-jam guides to complete full scoring cycles in under five seconds.
- Custom odometry hardware: CAD-modeled and mounted passive tracking-wheel modules (encoders + omni wheels) that fed live position data to our autonomous routines.
- Iteration under pressure: swapped entire drivetrains mid-season, kept a modular frame so subsystems (intake, indexer, lift) could be lifted off and re-bolted in a single evening practice.
- Data-driven performance tuning: logged shot times, cycle counts, and motor temps; balanced port usage and added elastic assistance to keep V5 motors within safe current limits during back-to-back skills matches.
Tipping Point⚖️
Skills Developed ✅
- Integrated single-acting pneumatic cylinders and flow-control valves to power end-game hooks and passive locks, mastering leak testing and pressure tuning.
- Used a CNC to cut polycarbonate gussets and a self-locking claw with over-center geometry, learning CAM workflows, feeds, and speeds for rigid plastics.
- Designed and built successive lift mechanisms—parallel four-bar, single reverse four-bar, and double reverse four-bar—calculating linkage ratios, pivot spacing, and elastic assistance for stable goal lifting.
- Refined a chain-belt conveyor that centered rings and fed them cleanly to the claw, adapting compression and roller spacing for faster cycle times.
- Integrating rubber-band assist systems to off-load heavy trays, reduce stall current, and extend motor run-time
- Balanced electrical and pneumatic power by allocating motors to drive and conveyor while letting air cylinders handle heavy lifting, reducing current draw and motor overheating.
- Combined CNC-milled polycarbonate plates with standard VEX C-channel to create lighter, stiffer assemblies that could be rebuilt quickly in the pits.
- Applied tracking-wheel odometry from the previous season to program smoother autonomous routes around mobile goals.
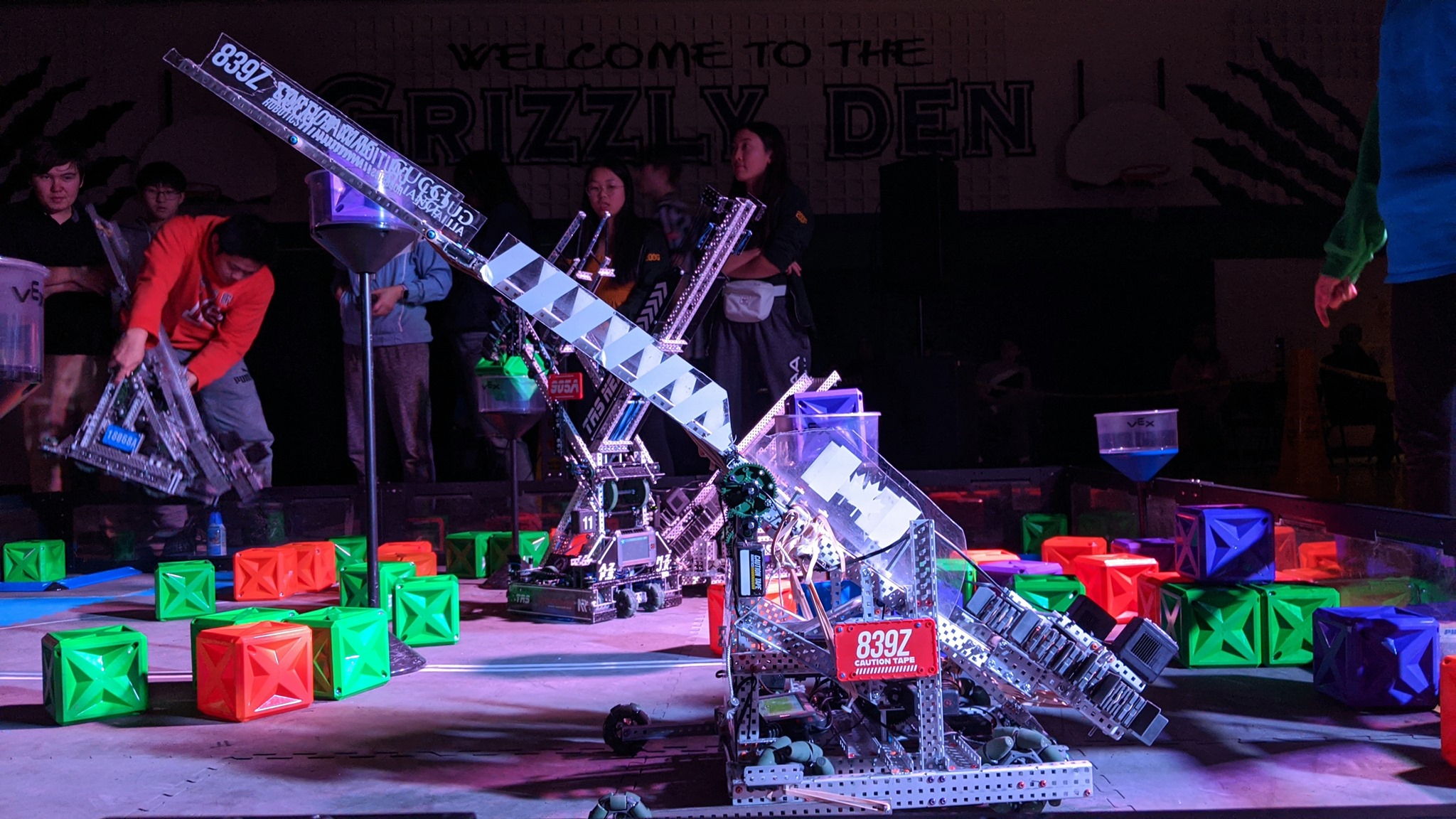
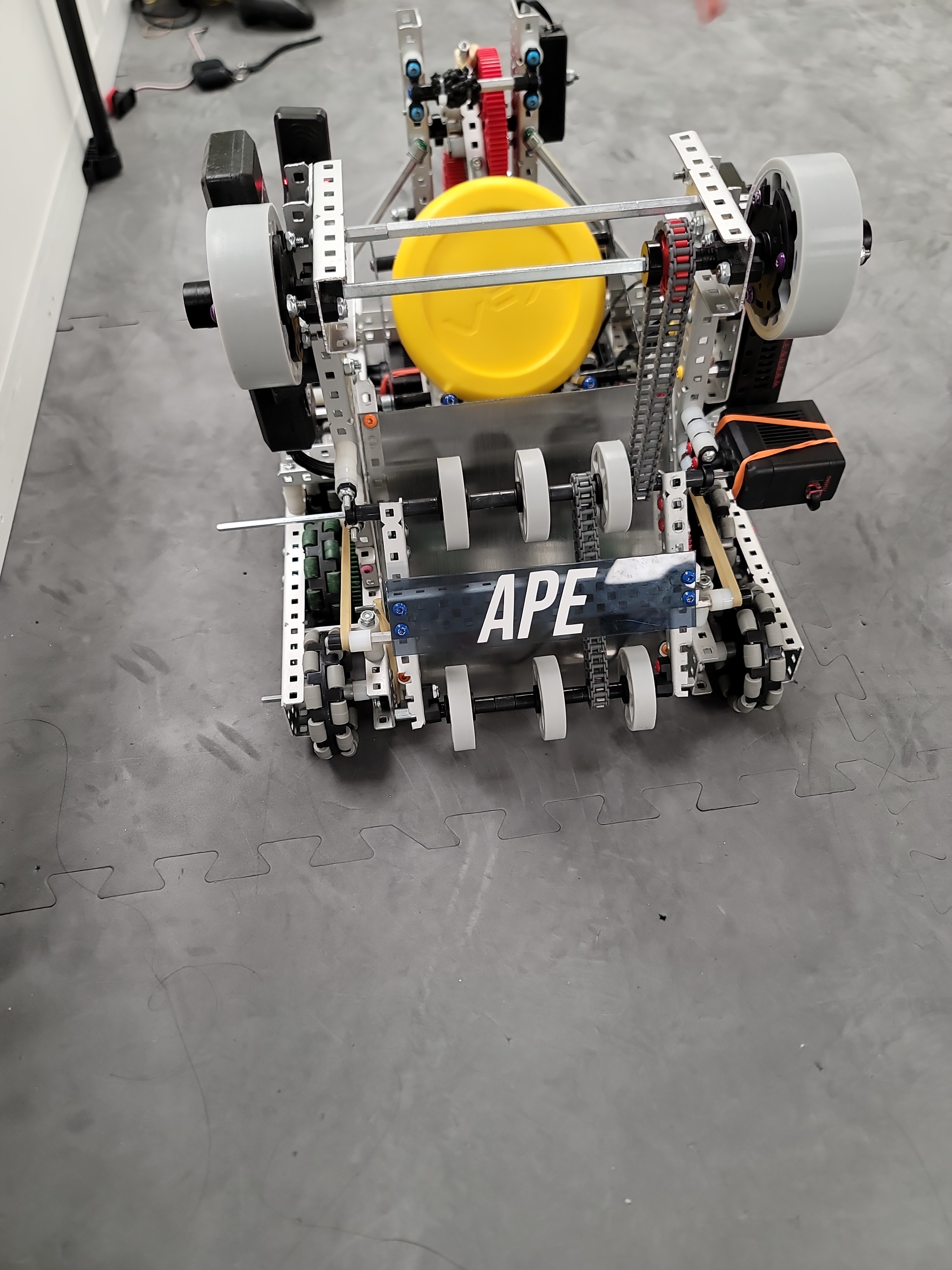
Spin Up 🥏
Skills Developed ✅
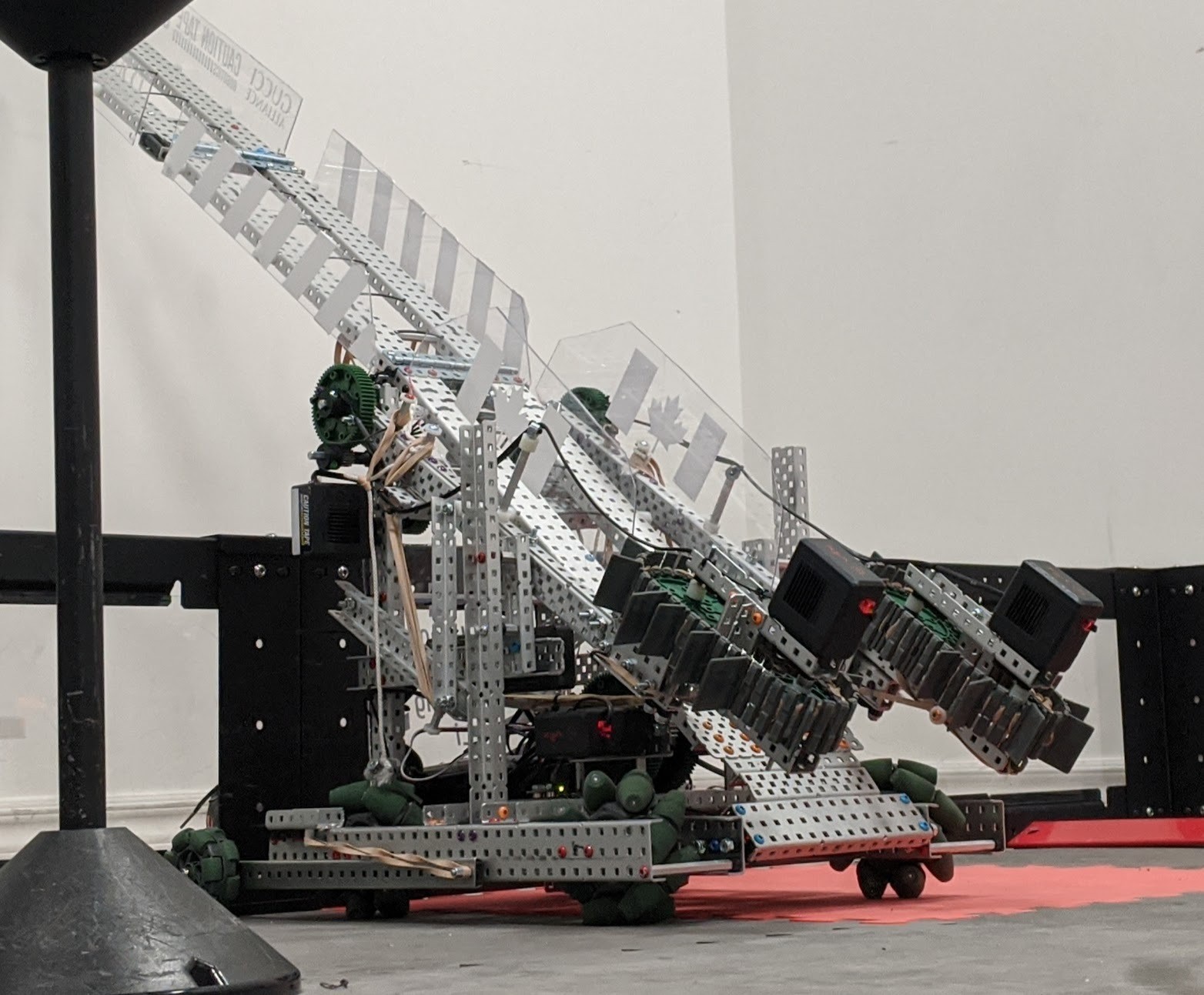
- Engineered a high-torque two-bar catapult with a chained rubber-band lattice, tuning band count, anchor angles, and a cam-lock trigger so the robot could launch three discs in a single, repeatable volley.
- Designed a low-profile roller intake with tapered compression rollers that pulled discs up a polycarbonate chute and into a “grouping gate,” aligning them edge-to-edge for consistent flight paths.
- Reinforced pivot towers and axle supports with CNC-cut polycarbionate and alluminum cheeks after early stress tests revealed bending under full-power launches.
- Integrated a limit switch on the trigger; this fed disc-count logic that prevented dry-fires and let us queue exactly three shots before release.
- Balanced weight and frame rigidity by combining 3-D-printed spacers with VEX C-channel, reducing vibration that had been scattering discs inside the hopper.
- Fine-tuned flywheel-less launch geometry—calculating release angle, exit velocity, and drivetrain braking so discs arc cleanly into high goals from multiple field zones.
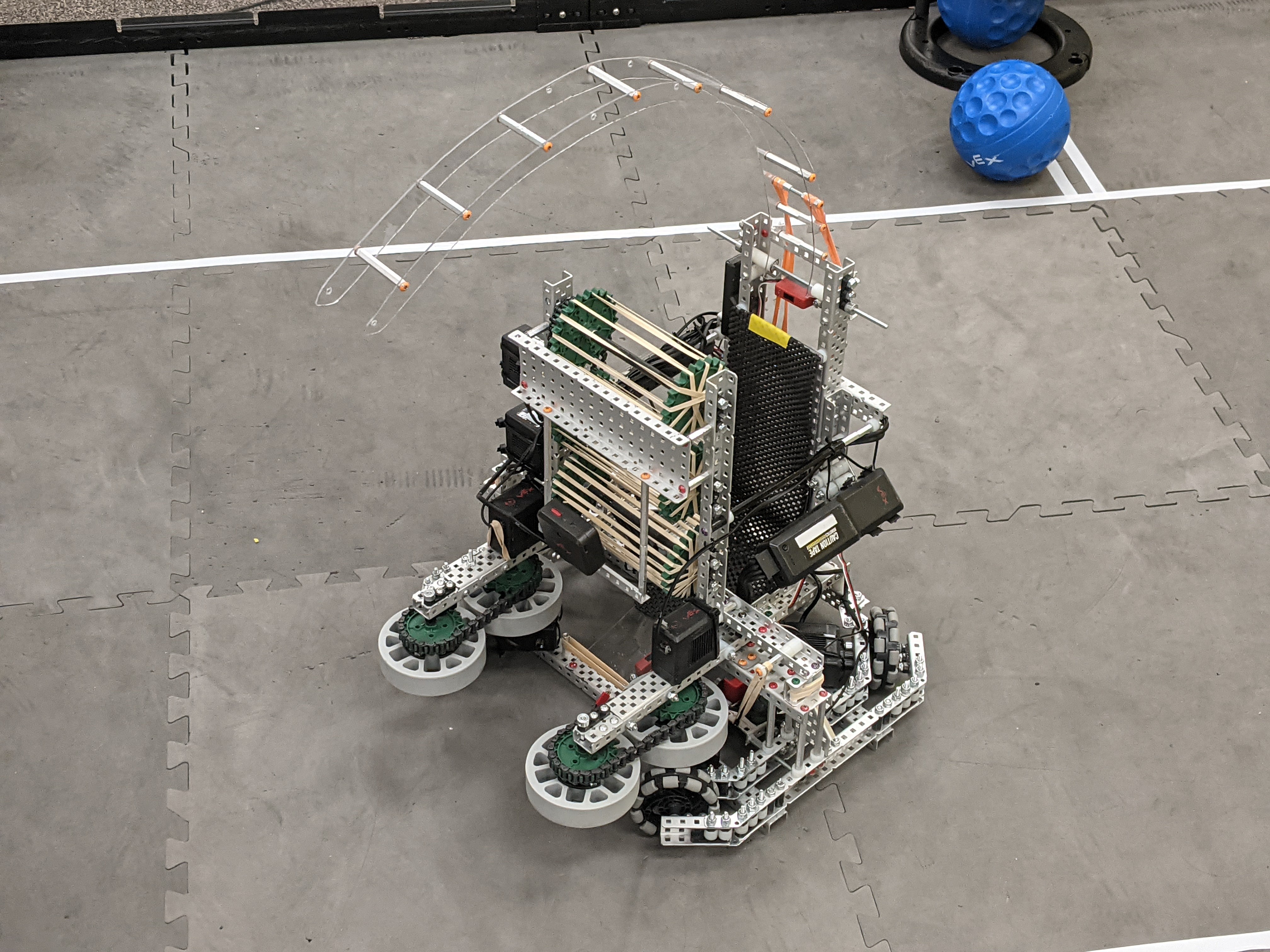
Over Under 🏁
Skills Developed ✅
- Engineered a six-motor, 360 rpm inline drivetrain that still met the <5 in height target
- Designed a pneumatic, double-acting intake arm that extends to the perfect Triball pickup height, then retracts flush so the bot can slip under the mid-field bar to descore.
- Fit two 100 psi air tanks plus regulators and solenoids inside the low chassis, learning compact plumbing layouts and rapid-fill safety procedures. Managing to fit all components using our CAD first approach
- Added side wings driven by air cylinders; the wings flare out to widen field coverage and herd loose Triballs into corner zones.
- Integrated a ratcheting winch-climb that reels the bot onto the elevation bar; learned to cut pawl angles, set preload springs, and calibrate release pins for one-pull lifts.
- Chose steel high-strength axles for the pneumatic intake roller—thin enough to keep the assembly under 5 in, yet stiff enough to survive full-speed dumps and defensive hits.
- CNC-machined polycarbonate side wings, each piston-driven to flare out in end-game, doubling field coverage while adding minimal weight.
- Shifted from primary driver to driver-coach, running nightly strategy huddles that reviewed match footage, scouted alliances, and set opening routes; on-field, I called shot counts, air-pressure reads, and defensive cues so our rookie driver could focus on execution.